![]() Locanthrope
Locanthrope
Computational foundations of human locomotion
ANR-PSIROB 2007
>> project team
Leader:
Jean-Paul Laumond, Gepetto team, LAAS-CNRS, Toulouse (website)
Partners:
Alain Berthoz, LPPA, Collège de France, Paris (website)
Armel Crétual, M2S, Université de Rennes 2, Rennes (website)
Julien Pettré, Bunraku team, INRIA, Rennes (website)
>> project description
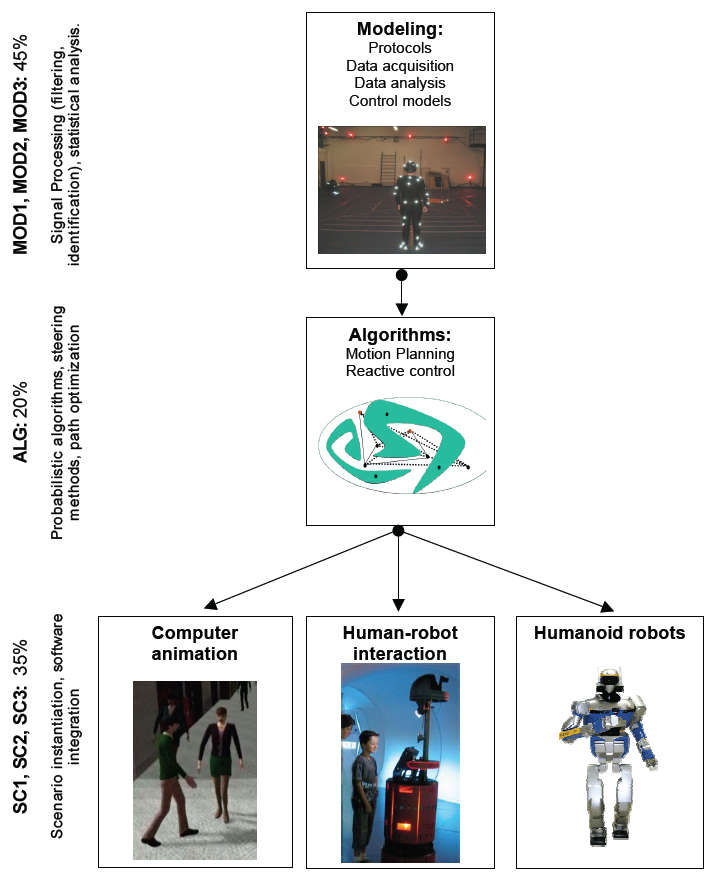
The human body is a complex mechanical system with numerous body segments. The project LOCANTHROPE argues that part of the internal cognitive state of a walking person may be observed from only few parameters characterizing the shape the locomotor trajectories. It aims at providing computational models of human locomotion as a way to simulate and plan human-like actions and interactions in both Robotics and Computer Animation. By computational models we mean models that are effective to be processed by simulation and planning algorithms. LOCANTHROPE is multidisciplinary basic research project gathering four teams in robotics (LAAS), computer animation (IRISA), biomechanics (M2S) and neurosciences (LPPA) respectively. The organization of the project is articulated around three types of workpackage:
- three workpackages are dedicated to human locomotion modeling. They follow a same methodology: protocol definition, data acquisition, data analysis. The cases of study deal with navigation in empty spaces, obstacle avoidance and people interactions. Modeling represents 45% of the effort.
- a workpackage is dedicated to the integration of locomotion models within algorithmic paradigms to plan and control motions for anthropomorphic systems. Algorithms represent 20% of the effort.
- the research performed will be steered by three demonstration scenarios dealing with computer animation (15%), human-robot interaction (10%) and humanoid robotics respectively (10%).
>> project publications
Articles in Conferences and Journals
K. Mombaur, M. Scheint, M. Sobotka
Optimal control and design of legged robots with compliance
Automatisierungstechnik 07/2009K. Mombaur, JP Laumond, E Yoshida
An Optimal Control Based Formulation to Determine Natural Locomotor Paths for Humanoid Robots
to appear in Advanced RoboticsK. Mombaur, A. Truong, J.P. Laumond
Identifying the objectives of human path generation
to appear in Computer Methods in Biomechanics and Biomedical EngineeringK. Mombaur, J.P. Laumond, A. Truong
An inverse optimal control approach to human motion modeling
to appear in ISRR 09 (International Symposium of Robotics Research), Springer STAR SeriesK. Mombaur, A. Truong , J.P. Laumond
From human to humanoid locomotion - an inverse optimal control approach”,
submitted to Autonomous RobotsJ. Pettré, J. Ondrej, A.-H. Olivier, A. Crétual and S. Donikian
Experiment-based Modeling, Simulation and Validation of Interactions between Virtual Walkers
Proceedings of the 2009 ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA'09), 2009Y. Zhang, J. Pettré, Q. Peng, S. Donikian
Data based steering of virtual human using a velocity-space approach”
submitted to Motion in Games 2009A.-H. Olivier, R. Kulpa, J. Pettre and A. Cretual
A velocity-curvature space approach for walking motions analysis
submitted to Motion in Games 2009L. Hoyet, F. Multon, K. Mombaur, E. Yoshida
Balance in dynamic situations: Role of the underlying model
top appear in Computer Methods in Biomechanics and Biomedical Engineering Date : 23/07/2009Q.C. Pham, H. Hicheur
On the open-loop and feedback processes that underly the formation of trajectories during visual and nonvisual locomotion in humans
submitted to Journal of NeurophysiologyHideki Kadone, Delphine Bernardin, Daniel Bennequin, Thomas Sugar, Mohamed Zaoui, Alain Berthoz
Primitive synergies between gaze, head, torso, pelvis and feet during locomotion in humans A "Top-Down" Model”, in preparation for Experimental Brain ResearchQ.C. Pham, A. Berthoz, H. Hicheur
The influence of vision and gait direction on formation of locomotor trajectories and anticipatory head movements
in preparation for Experimental Brain ResearchPresentations and Posters
L. Hoyet, F. Multon, K. Mombaur, E. Yoshida
Influence du choix du modèle sur l'estimation du centre de pression et du ZMP
JNRH Journées Nationales de la Robotique Humanoïde, Nantes, Mai 2009A.H. Olivier, A. Crétual
Stratégies d’évitement de collision entre deux piétons lors d’un croisement à 90°
JNRH Journées Nationales de la Robotique Humanoïde, Nantes, Mai 2009K. Mombaur, J-P. Laumond, Eiichi Yoshida
Génération des chemins naturels pour des robots humanoides avec la commande optimale
JNRH Journées Nationales de la Robotique Humanoïde, Nantes, Mai 2009A. Truong, K. Mombaur, J.P. Laumond
On the relationship between body orientation and direction of motion during human locomotion
19th International Conference of the International Society for Posture and Gait Research, Bologne, Italie, Juin 2009H. Kadone, H. Hicheur, J. Grezes, A. Berthoz
Nature of the kinematic cues underlying the perception of emotions during human gait
19th International Conference of the International Society for Posture and Gait Research, Bologne, Italie, Juin 2009M. Sreenivasa, P. Souères, J.P. Laumond, A. Berthoz
Steering a humanoid robot by its head
IEEE IROS, Saint Louis, USA, 2009.